

Details
Type
- Bachelor Thesis
- Student Project
- Master Thesis
Persons
Description
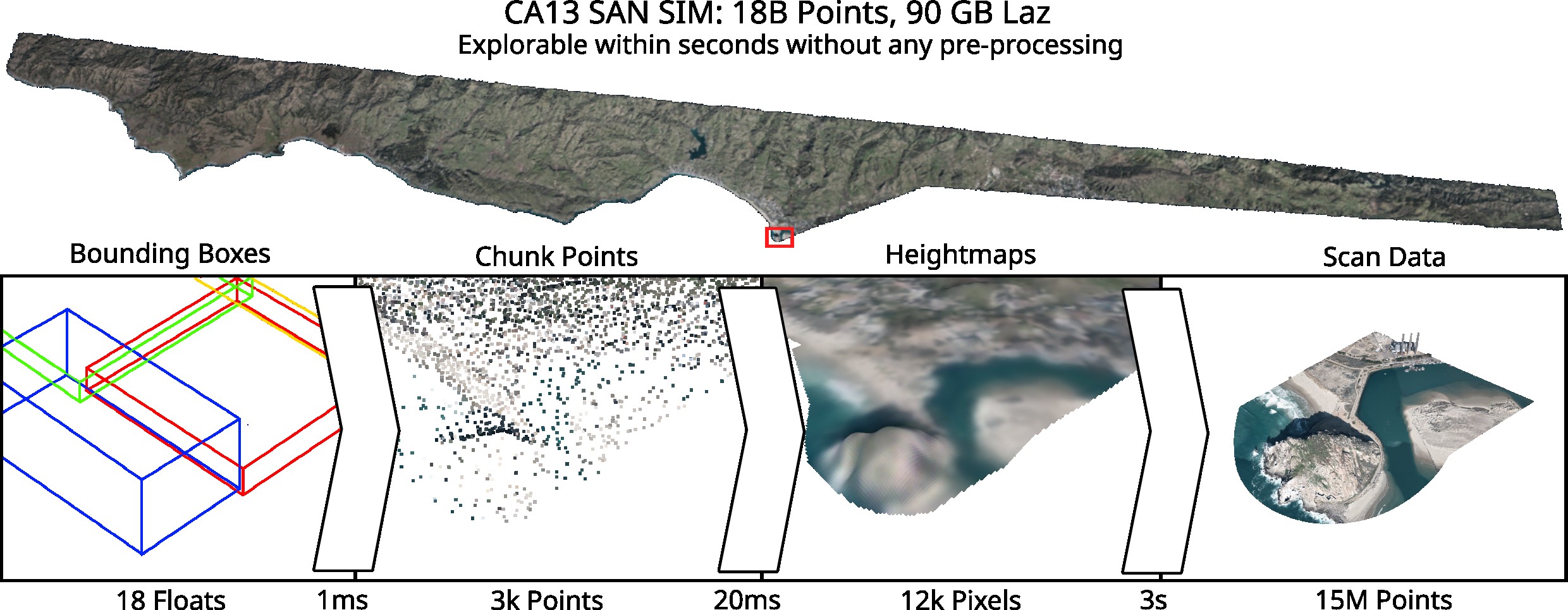
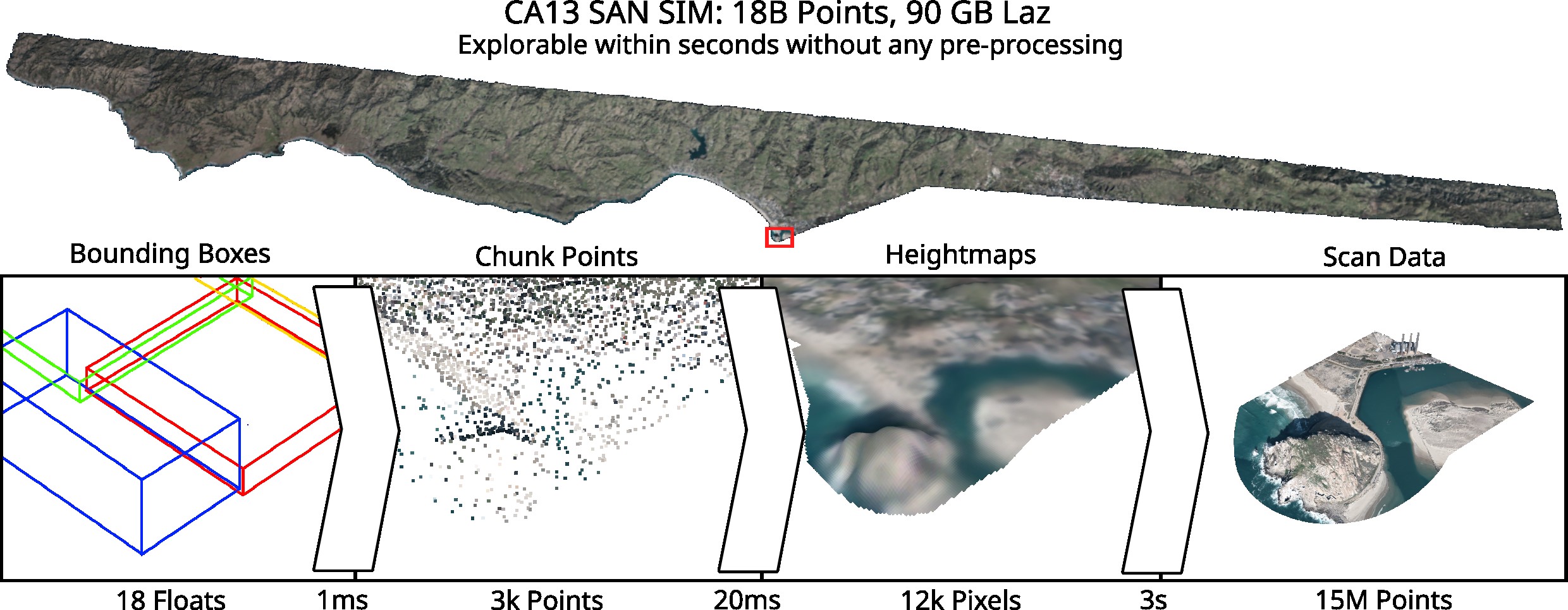
We want to extend our recently published LidarScout from heightmaps to full 3D data. With LidarScout, you can explore large point clouds (aerial lidar scans) within seconds, where other methods would take hours to days of preprocessing.
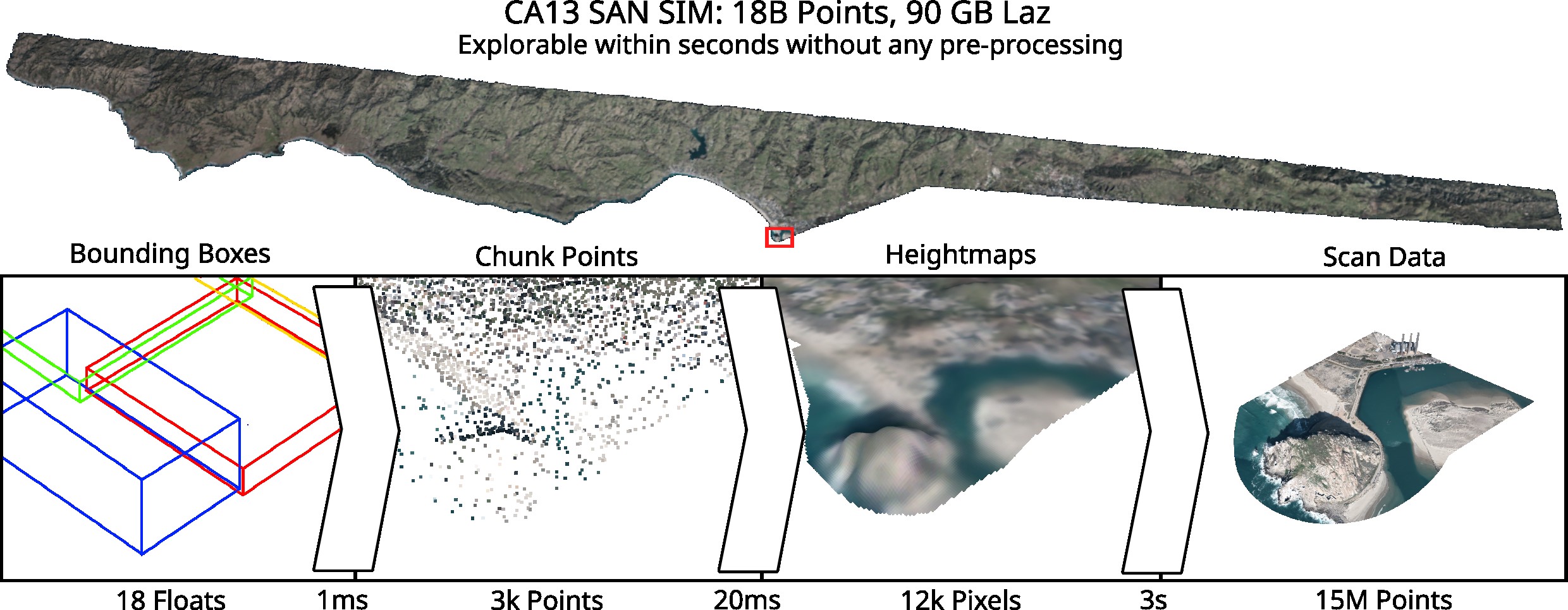
LidarScout works like this: Every 50'000th point corresponds to the compressed LAZ format, which compresses point clouds in chunks of 50k points. The first point of each chunk is uncompressed, and can therefore be easily loaded with random access. We can predict heightmaps from this sparse subsample.
Scans of e.g. cities and caves cannot be represented well with heightmaps. Therefore, we want to try some extensions like splitting the domain into cubes and predicting the heightmaps for all cube faces. However, this will make consistent edges more difficult.
More details:
- https://github.com/cg-tuwien/lidarscout
- https://diglib.eg.org/items/b044b2fe-88c1-4fe4-9ed2-2424fb2ed036
The extended version should work with city scans like the Vienna Kappazunder. We can do something similar with volumetric data, like astronomical simulations and CT scans. Also, we have a few ideas for improving the heightmap version.
Tasks
Some of these, depending on the type of thesis:
- Subdivide the domain into cubes and estimate surfaces for the faces
- Generate a dataset and train the CNN predictor
- Update the viewer to work with these surfaces
Requirements
- Knowledge of C++ and/or Python
- Knowledge of English language (source code comments and final report should be in English)
- Bonus for experience with CUDA, Pytorch, Implicit surfaces
Environment
The viewer is to be implemented as a standalone C++/CUDA application.
The training part is to be implemented as a Python project.
A bonus of €500/€1000 if completed to satisfaction within an agreed time-frame of 6/12 months (PR/BA or DA)
Additional Images and Files
| Attachment | Size |
|---|---|
| LidarScout | 394.28 KB |
{kind=link}